Descripción
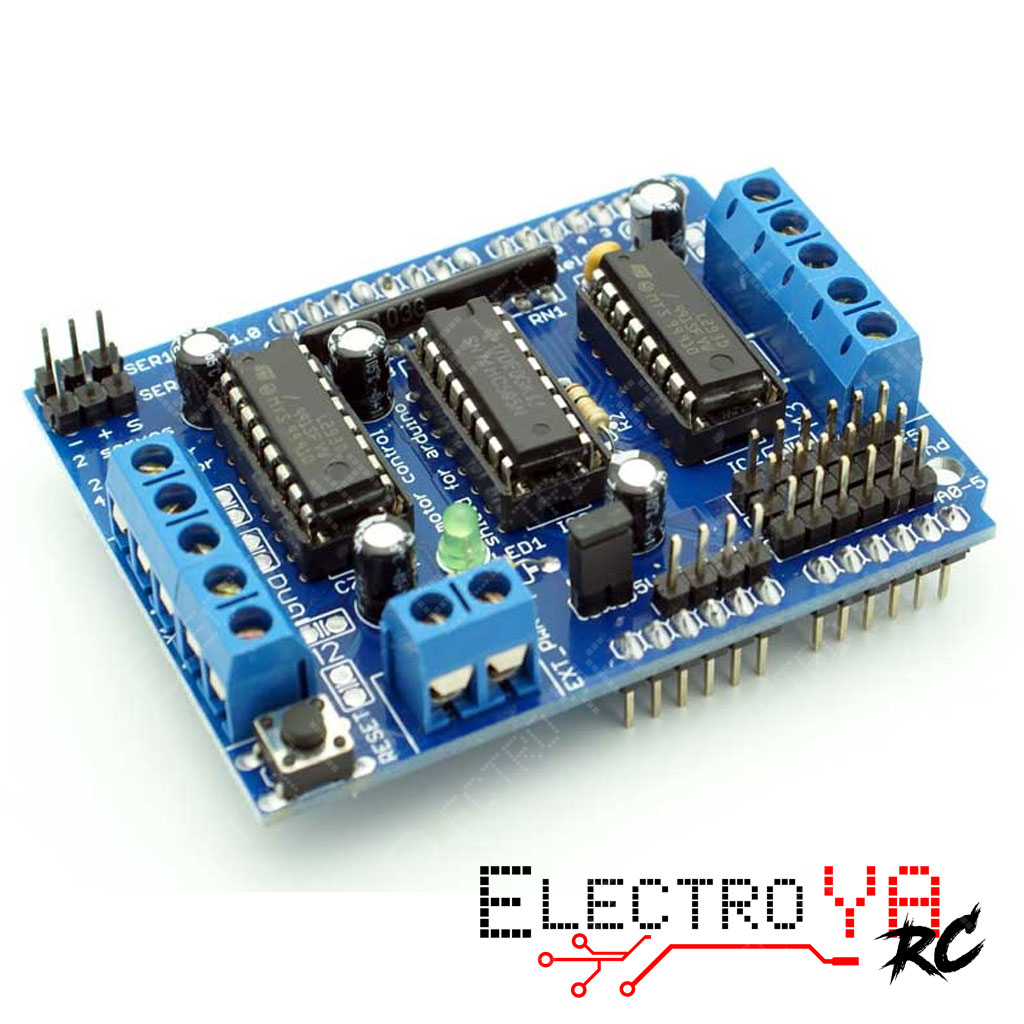
Controlador de Motor L293D para Arduino
Esta placa de control de motores y servos es capaz de controlar por sus puente en H (chip L293D) motores con una carga máxima de 1,2 Amperios y trabajar de un mínimo de 4,5 Volts hasta 10 Volts
siempre teniendo en cuenta los distintos voltajes de trabajo de nuestra controladora y los motores.
| Dispositivo | Minimo | Normal | Maximo | Unidad |
| Controlador | 4,5 | 5 | 5,5 | V |
| Controlador de Motor | 6 | 9 | 15 | V |
| Salida de Corriente | / | / | 1,2 | A |

Este controlador nos permite utilizar 4 motors DC (Corriente Continua) o 2 motores paso a paso, ademas de 2 servos y 6 entradas analógicas para sensores.
podemos alimentar nuestra controladora Arduino desde este dispositivo para no tener alimentaciones redundantes utilizando un puente o jumper

Pines de salida para control.
Los Pines A0 hasta A5 son los pines de entrada para sensores.
Pin digital 2 (el pin 2 es el unico que no esta conectado a nada ) y 13 NO se utilizan.
Los siguientes pines están en uso si los MOTORS DC / Stepper están en uso:
Pin Digital 11: Motor DC #1 /Pasos a paso 1 (Activacion / Control de Velociadad)
Pin Digital 3: Motor DC #2 /Pasos a paso 1 (Activacion / Control de Velociadad)
Pin Digital 5: Motor DC #3 /Pasos a paso 2 (Activacion / Control de Velociadad)
Pin Digital 6: Motor DC #4 /Pasos a paso 2 (Activacion / Control de Velociadad)
Los siguientes pines están en uso si se Utilizan DC /Stepper:
Los pines 4, 7, 8 y 12 se utilizan para controlar los motores CC / Pasos a paso a travez del chip 74HC595.
Los pines para servos son: 9 controla el servo1 y 10 servo 2.
Podemos simplificar la programación de este componente ya que viene con una librería que nos facilita su uso
Codigo Ejemplo:
#include <AFMotor.h>
AF_DCMotor motor(1); // Activamos el motor 1 del Shield
void setup() {
Serial.begin(9600); // configuramos la libreria del puerto serie a 9600 baudios
Serial.println("Motor test!");
motor.setSpeed(200); // definimos la velociadad del motor a 200 (mínimo 0 máximo 255)
}
void loop() {
Serial.print("tick");
motor.run(FORWARD); // Activamos el motor para que avance
delay(1000);
Serial.print("tock");
motor.run(BACKWARD); // activamos al motor para que retroceda
delay(1000);
Serial.print("tack");
motor.run(RELEASE); // paramos el motor y lo liberamos
delay(1000);
}




{kind=link}
Valoraciones
No hay valoraciones aún.