
![]()
F-35 LIGHTNING
CONTROLADORA DE VUELO
MANUAL DE USUARIO VERSION 1.0

|
Por favor contactar con nosotros para más información: Soporte Técnico: tech@furiousfpv.com Soporte Ventas: sales@furiousfpv.com Página Web: http://furiousfpv.com/ |
 |
Contenido
Introducción
Funciones
Esquema de conexiones
Dimensiones
Conexiones:
Conexion con Variador/es y Servos
Conexionado a los Receptores
I. Receptor TBS 9
- TBS Crossfire Micro Rx V2 (Plug and play con Cable Micro Rx)
- TBS Crossfire Micro Rx V2 (Plug and Play con Cable Micro Rx y Cable TBS-Ext para Conexión Inalámbrica
- TBS Crossfire Diversity Rx Solo Usando Protocolo CRSF
- TBS Crossfire Diversity Rx Usando PPM + Serial TX-RX
II. Receptores FrSky 12
II. Receptores Futaba
III. Receptores Spektrum
IV. Receptor Dragon Link Micro UHF
Conexionado a los VTX:
- Usando VTX Stealth Long Range (Plug and Play con Cable VTX)
- Usando Tramp HV
- Usando TBS Unify Pro 5G8 HV
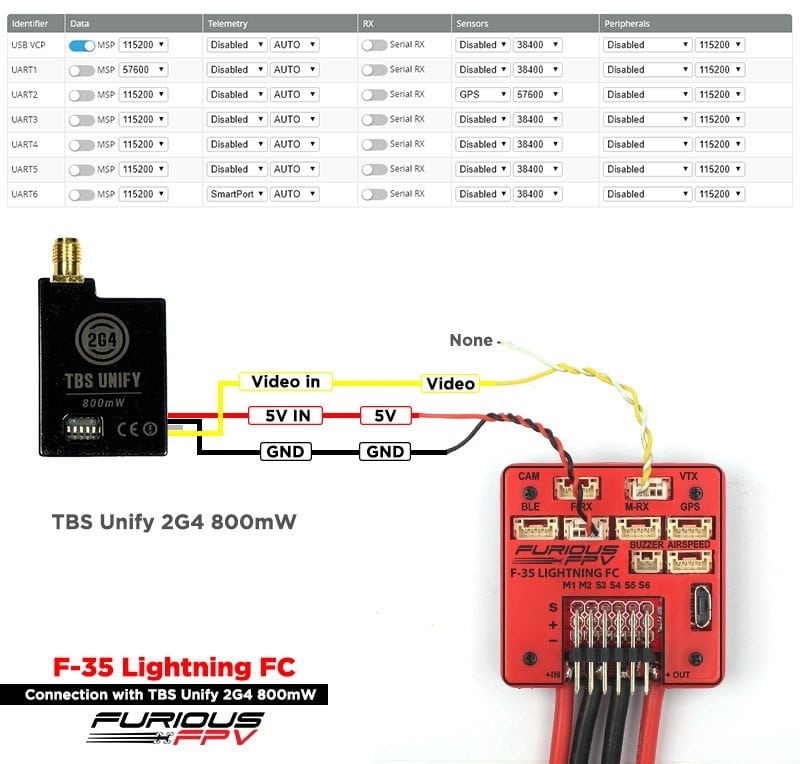
- Usando TBS Unify 2G4
Conexionado del Sensor de Velocidad de Aire (Furious AirSpeed)
Conexionado con Modulo GPS (Furious GPS Module) (Plug and Play con cable GPS)
Conexionado con GPS RadioLink M8N
Conexionado con Cámaras (Plug and Play con cable CAM)
Como configurar Ala Fija con INAV Configurator
Calibración de Sensores
Conectar INAV Inalámbrico a F-35 a través de TBS Crossfire TX
Como conectar Smartphone a F-35 FC a través de Modulo Bluetooth (FuriousFPV)
Configurar Failsafe
Como usar función NAV LAUNCH (Auto despegue)
Modos de Vuelo INAV
Videos Guia
Introducción
Furious FPV F-35 Lightning FC – Eleva tus Horizontes.
Un paso adelante en la nueva controladora de vuelo F-35 Lightning, La primera controladora de FuriousFPV dedicada al vuelo con ala fija, lista y esperando abrir un Nuevo mundo a los amantes del vuelo en aeroplano.
Encapsulada en una robusta carcasa de aluminio para unos niveles de protección máximos, la controladora F-35 ofrece el ultimo nivel en capacidad de conexión con todo lo necesario para el vuelo FPV
Conexiones muy sencillas con un procesador MCU STM F4, la controladora F-35 soporta totalmente (6) UART’s para GPS, VTX, Telemetría S.PORT, Crossfire, Funciones Bluetooth, etc. Con estos sistemas en juego, la F-35 ofrece infinidad de combinaciones en un máximo rendimiento en el mundo de los vuelos en FPV.
Integrando un Bec de 5V@3A, puerto Buzzer, dampers anti vibración y monitorización de batería con sensor de corriente integrado, la F-35 contiene muchísimas funciones en un reducido espacio y de una manera compacta. Además añadirle también un sensor barométrico integrado y un sistema OSD, la F-35 es la nueva revolución en la que está lista para lo que cualquier piloto pueda imaginar.
Lleva tu vuelo en Aeroplano FPV a nuevos mundos con la controladora de vuelo de Furious FPV F-35 Lightning – el sistema definitivo para el vuelo alado del FPV.
Funciones
Controladora de vuelo 10 DOF: Giróscopo Integrado, Acelerómetro, Magnetómetro, Barómetro, Sensor de velocidad de aire ( Analógico o Digital) + GPS
MCU STM F4 alto rendimiento
OSD Integrado
Soporta hasta 6 UARTs (GPS, Control VTX, S.PORT Telemetría,
Crossfire RX, RX, Bluetooth)
Inversor SBUS integrado y en conexiones S.PORT
Sensor de Voltaje y de Corriente integrados.
Puente Cámara a VTX integrado
BEC 5V@3A Integrado Para pequeños servos digitales, se puede cambiar fácilmente a BEC externo para servos mas grandes
Puerto Buzzer Integrado
Cables de silicona de alta calidad con longitud optimizada para todas sus funciones
Soporta Firmware INAV
Puertos y USB Verticales para fácil instalacion
La Versión PRO incluye modulo GPS, Sensor de Velocidad de Aire , Buzzer y Modulo Bluetooth
Peso: 34g
Rengo de Voltaje: 2S-6S LiPo
Esquema de Conexiones

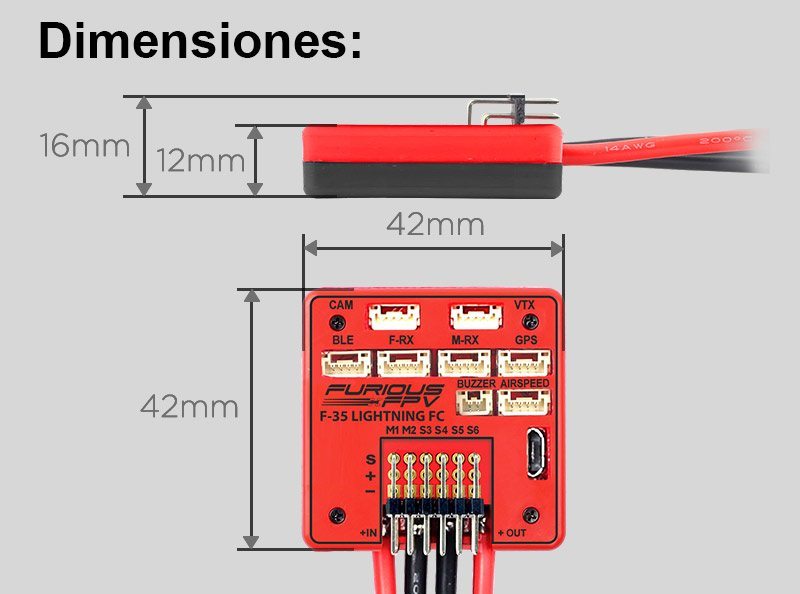
Dimensiones
Conexiones
Conexionado con Variador/es y Servos:
1. Ala Fija:

Variador/es en canales: 1 y 2
Servos en canales: 3 y 4
Ej: Ala Fija Reptile S800 Sky Shadow


Variador/ese n canales: 1 y 2
Servos en canales: 3, 4, 5 y 6
Ej1: Volantex Ranger

Ej2: Twin Dream

Abrir INAV Configurator Ir a la pestaña de CLI y pegar esta líneas que hay debajo, luego apretar la tecla Enter:
# mixer
mixer CUSTOMAIRPLANE
mmix reset
mmix 0 1.000 0.000 0.000 0.300 #Left motor
mmix 1 1.000 0.000 0.000 -0.300 #Right motor
# servo mix
smix reset
smix 0 3 0 100 0 #servo 3 takes Stabilised ROLL (PWM 4)
smix 1 4 0 100 0 #servo 4 takes Stabilised ROLL (PWM 5)
smix 2 5 2 100 0 #servo 5 takes Stabilised YAW (PWM 6)
smix 3 2 1 100 0 #servo 2 takes Stabilised PITCH (PWM 3)
save

Ex 3: V-Tail
Abrir INAV Configurator Ir a la pestaña de CLI y pegar esta líneas que hay debajo, luego apretar la tecla Enter:
# mixer
mixer CUSTOMAIRPLANE
mmix reset
mmix 0 1.0 0.0 0.0 0.0 # motor
smix reset
smix 0 2 0 -100 0 # servo 2 takes Stabilised ROLL
smix 1 3 0 -100 0 # servo 3 takes Stabilised ROLL
smix 2 4 1 100 0 # servo 4 takes Stabilised PITCH
smix 3 5 1 -100 0 # servo 5 takes Stabilised -PITCH
smix 4 4 2 -100 0 # servo 4 takes Stabilised YAW
smix 5 5 2 -100 0 # servo 5 takes Stabilised YAW
smix 6 6 8 -100 0 # servo 6 takes RC AUX 1 (camera yaw)
smix 7 7 9 -100 0 # servo 7 takes RC AUX 2 (drop bomb)
save

Conexionado a los Receptores:
*Atención: Solo utilizar BEC 5v para la electrónica principal
I. Receptor TBS
1. TBS Crossfire Micro Rx V2 (Plug and play con Cable Micro Rx)

2. TBS Crossfire Micro Rx V2 (Plug and Play con Cable Micro Rx y Cable TBS-Ext para Conexión Inalámbrica
Video: Wireless connection to INAV via TBS Crossfire Tx + TBS Micro Rx V2

3. TBS Crossfire Diversity Rx Solo Usando Protocolo CRSF

4. TBS Crossfire Diversity Rx Usando PPM + Serial TX-RX

*Nota: Usando PPM, es necesario abrir INAV Configurator ir a la pestaña de Configuración bajar a pestaña Receiver Mode. Luego, Seleccionar PPM RX input como en la imagen:

II. Receptores FrSky
1. XSR (Plug and Play con cable F-RX)

2. R9

3. R9 Slim

4. L9R

5. SPD15

6. XM+

II. Receptores Futaba

III. Receptores Spektrum

IV. Receptor Dragon Link Micro UHF
*Nota: Comprobar que el pin PPM del receptor es convertido a SBUS mediante el Software de Dragon Link

Conexionado a los VTX:
1. Usando VTX Stealth Long Range (Plug and Play con Cable VTX)

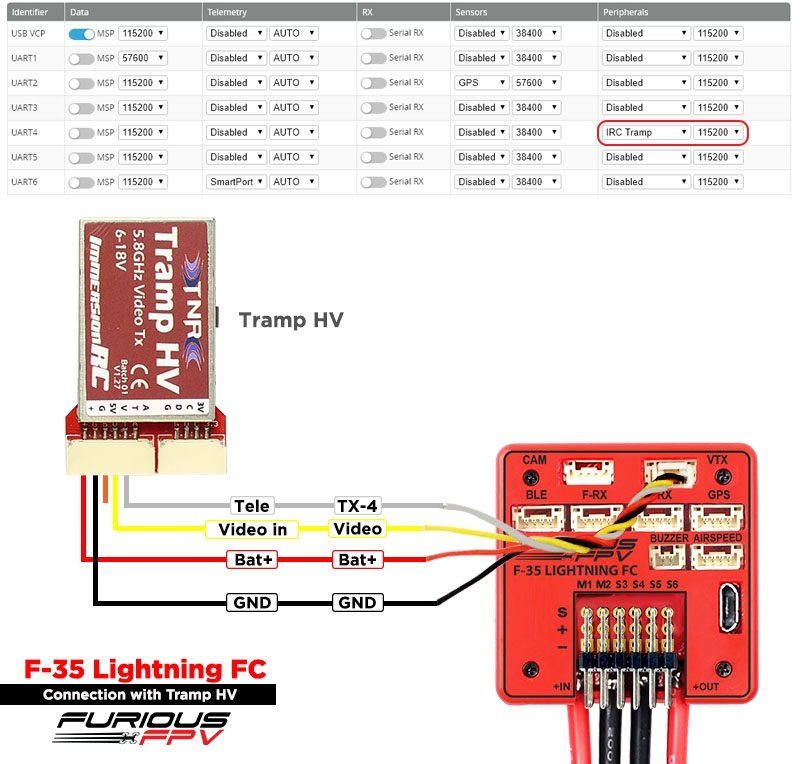
2. Usando Tramp HV
*Nota: Si usas el Cableado Subministrado (VTX), por favor cambiar los pin acorde con el pinout del VTX
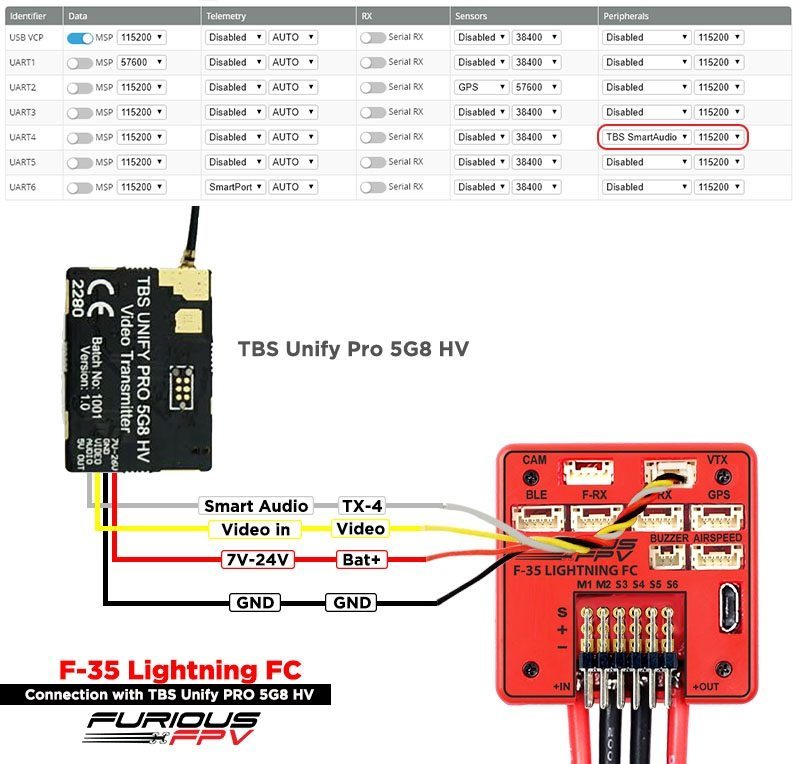
3. Usando TBS Unify Pro 5G8 HV:
Conexionado del Sensor de Velocidad de Aire (Furious AirSpeed)

Conexionado con Modulo GPS (Furious GPS Module) (Plug and Play con cable GPS)
*Atención: La primera vez que se configura o si se cambia la localización al arrancar, hay que dejar el Aeroplano en el campo aproximadamente 5 minutos para que el GPS se actualice.

Abrir INAV Configurator Clic pestaña Configuración Bajar a GPS y configurar la pestaña como en la foto:

Conexionado con GPS RadioLink M8N

Abrir INAV Configurator Clic pestaña Configuración Bajar a GPS y configurar la pestaña como en la foto:

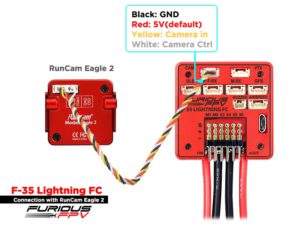
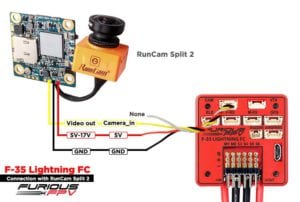
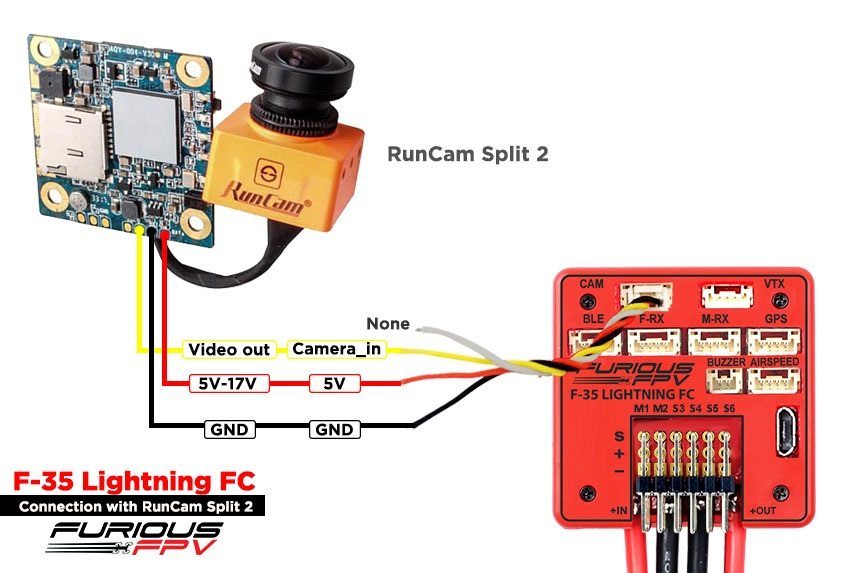
Conexionado con Cámaras (Plug and Play con cable CAM)
RunCam Eagle 2
RunCam Swift 2


RunCam Split 2

Foxeer Arrow Mini
Como configurar Ala Fija con INAV Configurator
Paso 1: Calibrar Sensores (Doble Clic para ir a la página de Calibración de Sensores)
INAV necesita que sigas los pasos de calibración. Estos pasos son diferentes a CleanFlight o BetaFlight. Así que por favor no te saltes esta sección, es de vital importancia. Pero si tenemos conexión inalámbrica lo podemos hacer al final.
Video: Calibración de sensores mediante conexión inalámbrica
Paso 2: Configurar la pestaña de “Puertos”
Si usas el receptor TBS Crossfire Micro, no es necesario cambiar nada. Porque nosotros ya lo hemos dejado pre configurado.
Si usas el receptor XSR, por favor activa el Serial Rx del UART3 para usar el Modo de Receptor
Paso 3: Configurar la pestaña de “Configuración”
Si usas el receptor TBS Crossfire Micro, no es necesario cambiar nada. Porque nosotros ya lo hemos dejado pre configurado.
Si usas el receptor XSR, bajar a Modo Receptor y seleccionar SBUS en Serial Receiver Provider
Cambiar Modelo: Hay dos opciones disponibles: Ala Fija o Avión
|
|
Paso 4: Configurar la pestaña de “Receptor”
Ajustar rango y valores: Tu emisora NO debería usar ningún tipo de mezcla (usar canales separados para Ale, Elev, Gas y Cola. Comprobar que todos los canales al mover los sticks se mueven en el orden correcto en la ventana de receptor. También comprobar que en el centro de los sticks tenemos 1500us, y los topes de movimiento deberían estar en 1000-2000us. Usar los Subtrims y los End-Points en la emisora para configurarlo.
Comprobar Mapa de Canales: Configurar el mapa de canales de tu emisora correctamente en el configurador.
Paso 5: Configurar la pestaña de “Servos”
Si el Servo se mueve al contrario, cambiar «Direction and rate» de +100 a -100
Si el Servo sobrepasa el máximo de recorrido deseado reducir el min/max
Si las superficies de control no están perfectamente centradas ajustar el servo midpoint. (esto es después de llevarlo lo más cerca posible mecánicamente)
*Note: En la pestaña de servos están contabilizados de 0 a7 mientras que en la pestaña de motores están del 1 al 8.
Paso 6: Configurar pestaña “Mode” (clicar Mode para ir a la tabla de modos disponibles)
1. Seleccionar Pestaña de “Modes”
2. Agregar el modo que quieres usar. Luego, clic Add Range y seleccionar el CH canal con el que quieres usar el modo
Paso 7: Configurar Failsafe
Calibración de Sensores
Después de construir un nuevo avión, es necesario calibrar el Magnetómetro y el Acelerómetro. Con la controladora F-35Lightning, no es necesario conectar el cable USB ya que tenemos la opción de conectarlo de manera inalámbrica a través del Modulo Bluetooth FuriousFPV o TBS Crossfire TX.
Paso 1: Conectar la controladora F-35 Lightning con el configurador INAV
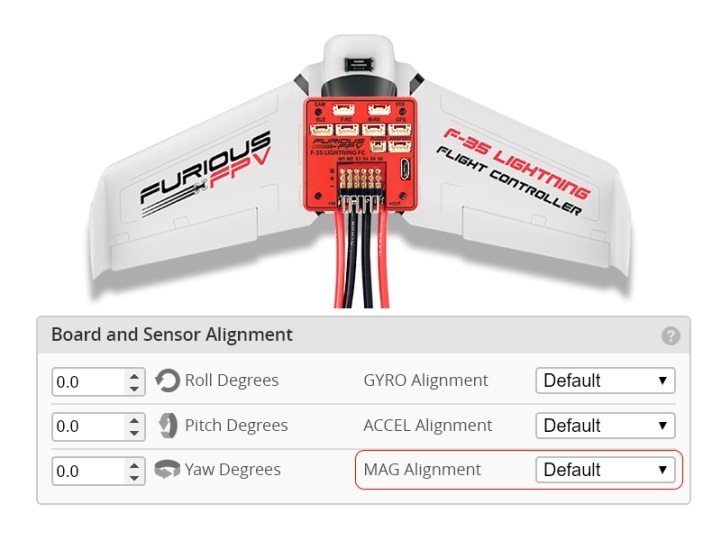
Paso 2: En la pestaña Setup
1. Orientacion de la Controladora: Si tienes la controladora rotada en cualquier posición, es necesario cambiar la rotación para que coincida con una de las fotogracias a continuación:
| (1)
|
(2)
|
| (3)
|
(4)
|



2. Calibrar Acelerómetro: Por favor, clic Calibrate Accelerometer para calibrar los 6 puntos del Acelerómetro como en las fotos a continuación:

3. Calibración de Brújula: Por Favor, clic Calibrate Magnetometer luego tiene 30 segundos para mantener el avión en el aire y rotarlo hacia todos los puntos (delante, detrás, izquierda, derecha, arriba y abajo) 360º.
Conectar INAV Inalámbrico a F-35 a través de TBS Crossfire TX
El Dispositivo:
TBS Micro RX V2 + TBS Crossfire TX
Cable Micro RX para F-35 + cable TBS-External para F-35 (Incluido en el paquete)
App: INAV Configurator para PC, EZ-Gui para Android.
Video: Conexión inalámbrica a INAV a través TBS Crossfire Tx + TBS Micro Rx V2
Paso 1: Usando el conector del cable TBS-Ext al cable Micro RX como en la foto:

Paso 2: Remapear las salidas como para TBS Micro RX.
Salida 1: CRSF TX
Salida 2: CRSF RX
Salida 3: Serial RX
Salida 4: Serial TX
Paso 3: Configurar tu módulo TBS Crossfire.
Por favor seleccionar el modo protocolo Bluetooth en BRIDGE.
*Nota: comprobar que has activado la Telemetria en la pestaña “Reciever”.
Paso 4: Conectar tu dispositivo para usar la app Configurator.
Opción 1: Conectar con el PC:
1. Usar la búsqueda Bluetooth del PC y añadir el modulo Bluetooth TBS. Normalmente TBS tiene como nombre Crossfire#### (# son números).
2. Abrir Configurador INAV en el PC, luego comprobar el nuero puerto COM usado para conectar a través de TBS Crossfire TX y seleccionarlo. (Puedes comprobar el numero de puerto Com en el Administrador de Dispositivos). Seleccionar en la pestaña de Baud rate a 57600.
3. Activar modo Inalámbrico en INAV arriba del todo a la derecha de la app. Luego clic en el botón de Connect para conectar .
Ahora ya puedes hacer lo mismo que con el cable usb mediante la conexión inalámbrica.
Opción 2: Conectar con la App de Android EZ-Gui:
1. Descargar e instalar la app desde aquí: DOWNLOAD
2. Activar el Bluetooth en tu teléfono
3. Abrir EZ Gui:
Clic en el icono de 3 bolas arriba-derecha y clicar en Settings para ir a la pestaña de ajustes y configurar las conexiones. Aquí, tendrás que seleccionar como Bluetooth luego clic SELECT BT DEVICE para buscar tu modulo Bluetooth TBS Crossfire y seleccionarlo cuando lo detecte.

Clic el icono Next y seleccionar el Firmware Cleanflight/Betaflight/INAV.

Clic el icono Next y seleccionar las unidades y demás opciones, después la app volverá a su página de inicio.
4. En la página de inicio, clic en Connect para conectar tu F-35 a tu móvil.
Como conectar Smartphone a F-35 FC a través de Modulo Bluetooth (FuriousFPV)
El Dispositivo:
Modulo Bluetooth FuriousFPV
App: INAV Configurator en el PC, EZ-Gui en Android.
Video: Calibrar sensores en modo inalámbrico mediante modulo bluetooth Furious FPV
Paso 1: Conectar modulo Bluetooth FuriousFPV a la controladora F-35 Lightning. Luego, en la pestaña de “Ports” en el INAV Configurator y configurar como en la foto a continuación:

Paso 2: Conectar EZ-Gui en la app de Android
1. Descargar e instalar la app desde aquí: DOWNLOAD
2. Activar el Bluetooth en tu teléfono
3. Abrir EZ-Gui:
Clic en el icono de 3 bolas arriba-derecha y clicar en Settings para ir a la pestaña de ajustes y configurar las conexiones. Aquí, tendrás que seleccionar como Bluetooth LE (HM-10 Module luego clic SELECT BT DEVICE para buscar tu modulo Bluetooth FuriousFPV y seleccionarlo cuando lo detecte.

Clic el icono Next y seleccionar el Firmware Cleanflight/Betaflight/INAV.
Clic el icono Next y seleccionar las unidades y demás opciones, después la app volverá a su página de inicio
4. En la página de inicio, clic en Connect para conectar tu F-35 a tu móvil.
Configurar Failsafe
Configurar el Volver a casa (RTH) en caso de failsafe con la finalidad: cuando el avión o ala se quede sin señal del transmisor automáticamente emprender una vuelta a casa
Paso 1: Configurar en “Receiver”
Hay dos opciones para configurarlo:
Opción 1: Cortar un canal
Opción 2: configurar una posición
1. Ir a la pestaña Modes y seleccionar un switch para el Failsafe
2. Asignar sticks y switches de la siguiente manera;
Gas: 0% (Sin Gas)
Alerón: 50% (No input, Stick center)
Timón: 50% (No input, Stick center)
Elevador: 50% (No input, Stick center)
Modo Failsafe: activado
Switch Armado: Desarmado (si usas stick para armar puedes saltarte esto)
Paso 2: Configurar INAV pestaña Failsafe
1. Seleccionar RTH en los ajustes de Stage

Como usar función NAV LAUNCH (Auto despegue)
Video: Como usar Función NAV LAUNCH (Auto despegue) con F-35 Lightning
Paso 1: Abrir “INAV Configurator” Seleccionar pestaña “Mode” agregar función NAV LAUNCH, clic “Add Range” y seleccionar CH canal en switch deseado para activar esta función.

Paso 2: Asignar switch modo “NAV LAUNCH” antes de Armado (no será activado hasta que se arme)
Paso 3: ARM el avión. El motor debería empezar a girar con el min_throttle seleccionado(si está activado el MOTOR_STOP, el motor no girara)
*Nota: NAV LAUNCH es automáticamente desactivado tras 5 segundos o por cualquier rectificación en el stick del transmisor
Verificar que el motor no responde al stick de gas mientras esta en este modo
Paso 4: Colocar el stick de gas en la posición deseada para que acelere al acabar el lanzamiento.
Paso 5: Lanza el avión.
*Nota: Tiene que ser una lanzada nivelada o un lanzamiento por gancho.
Step6: El lanzamiento o Nav Launch será desactivado en el momento en que el piloto desconecte el switch o que se mueva cualquier stick en el transmisor
Modos de Vuelo INAV
| No | Nombre de Modo | Descripción |
| 1 | ANGLE |
Modo estabilizado con auto-nivelado y ángulos de giro limitados. |
| 2 | HORIZON |
Modo estabilizado con auto-nivelado pero sin límite en ángulos de giro. |
| 3 |
NAV RTH |
Usado para volver a casa. No necesita ningún modo más seleccionado. |
| 4 |
NAV WP |
Usado para vuelo por Waypoints (puntos). No necesita ningún modo más seleccionado. |
| 5 |
PASSTHRU |
Usado en Alas Fijas para controlarlo todo en manual (Control Directo de Servo) |
| 6 |
AIR MODE |
Mantiene los controles de PID activos con el gas al mínimo |
| 7 |
HEADING HOLD |
Mantiene el actual cabeceo mediante el timón (cola). Se puede usar con y sin Brújula . |
| 8 |
ARM |
Usado para armar el aeroplano |
| 9 |
BEEPER |
Usado para activar el Buzzer |
| 10 |
OSD SW |
Activa y Desactiva el OSD (información en Pantalla) |
| 11 |
TELEMETRY |
Normalmente la Telemetría esta siempre activada, usando este modo se puede activar y desactivar a conveniencia. |
| 12 |
FAILSAFE |
Usado para activar manualmente el Failsafe |
| 13 |
HOME RESET |
Usado para designar un nuevo punto de partida para el aeroplano. |
| 14 |
GCS NAV |
Usado para que la estación de tierra pueda controlar algunas funciones |
| 15 |
FLAPERON |
Usado para activar los Flaps /Alerones en aviones |
| 16 |
NAV LAUNCH |
Usado para activar el auto despegue |
| 17 |
SERVO AUTOTRIM |
Usado para centrar los servos para establecer un vuelo nivelado |
| 18 |
AUTO TURN |
Ajusta automáticamente las ganancias PIFF en ala fija |
Vídeos de Guía:
Vídeo 1: Conexión inalámbrica a INAV a través TBS Crossfire Tx + TBS Micro Rx V2
Vídeo 2: Calibrar sensores en modo inalámbrico mediante modulo bluetooth Furious FPV
Vídeo 3: Como usar Función NAV LAUNCH (Auto despuegue) con F-35 Lightning
NOTA: El siguiente paso es esencial si se utiliza la versión 1.9 o dará errores de calibración.
-
- 1er paso: Descargar los archivos necesarios.
- Firmware «Inav_1.9.0_FF_F35_LIGHTNING_Fix_Calibrations» : https://furiousfpv.com/download.php
- Impulse driver fixer to install DFU driver: https://impulserc.blob.core.windows.n…
- 2do paso: Extraer el contenido del archivo descargado en una carpeta
- 3er paso: Ejecutar el INAV Configurator.exe (localizado en el archivo descomprimido previamente Inav configurator 1.9.1.rar)
- 4to paso: Conectar la controladora F35 por USB al PC
- 5to paso: Ejecutar “Impulse driver fixer.exe” y hacer clic en “Yes” para auto instalar el modo DFU. Esperamos que la instalación se complete antes de continuar.
- 6to paso: Volvemos al Inav configurator 1.8.1 y comprobamos los puertos, si el puerto esta como DFU vamos directos al paso 7, en caso contrario, por favor desconectar el cable, esperar un minuto y volver a conectar.
- 7to paso: En el Inav configurator 1.9.1 vamos a la pestaña “FIRMWARE FLASHER”, hacemos clic en “Load Firmware[Local]” y seleccionamos el archivo que hemos descargado en el paso 1. Hacemos clic en “FLASH” para proceder a la carga del firmware para la F-35.
- 1er paso: Descargar los archivos necesarios.
{kind=link}